混合现实的一个发展方向是实现多人共享空间,但其面临一系列的技术挑战。例如,各个混合现实系统需要建立某种形式的共同坐标。对于这一点,近来的设备利用即时定位与地图构建(SLAM)追踪系统的进步和深度摄像头模块来解决相关的问题。微软认为,通过在客户端设备之间共享精确注册的SLAM坐标系,我们将在多人混合现实世界空间中实现令人信服和无缝的体验。
但微软同样注意到,共享大型混合现实世界空间的SLAM坐标系统可能需要大量的内存和处理器计算。例如,在不同设备之间共享大量关键帧通常涉及向多个设备发送相同的大量数据。由于用户设备的带宽和内存受限,传输如此大量的数据可能导致性能问题。因此,共享SLAM坐标系统需要改进带宽和存储器效率。
在日前公布的一份名为“Systems And Methods For Utilizing Anchor Graphs In Mixed Reality(在混合现实中利用锚点图的系统和方法)”的专利中,这家公司描述了在多人共享环境中利用描点图的混合现实系统。
相关专利:Systems And Methods For Utilizing Anchor Graphs In Mixed Reality
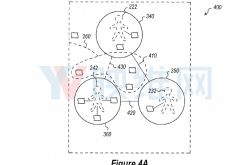
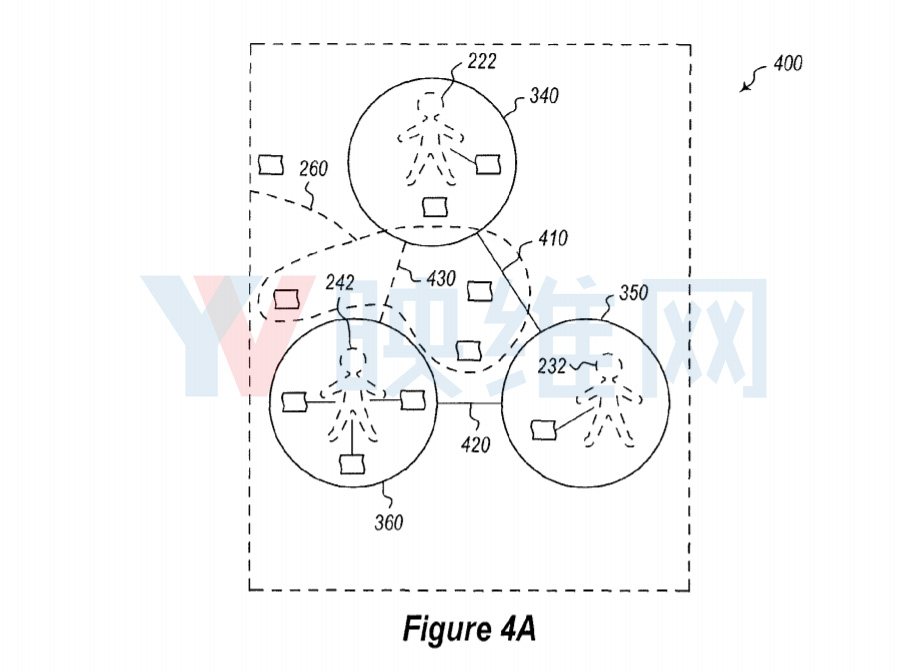
对于专利描述的混合现实设备和混合现实服务器系统,其能够生成锚点顶点,后者包括一个或多个关键帧,一个混合现实元素,以及将一个或多个关键帧连接至混合现实元素的至少一个变换。另外,混合现实设备和混合现实服务器系统配置为生成锚点边缘,所述锚边缘包括第一锚顶点和第二锚顶点之间的变换。各种锚点顶点和锚点边缘由混合现实服务器系统存储,并根据需要提供给用户设备。
系统将识别存储第一锚点图的第一设备,并检测第一设备何时位于接近于第一物理位置的预定位置范围。然后,系统将第一锚点顶点和第一锚点边缘发送至第一设备。第一锚点顶点包括至少一个第一关键帧,第一混合现实元素,以及将至少一个第一关键帧连接到第一混合现实元素的至少一个第一变换。